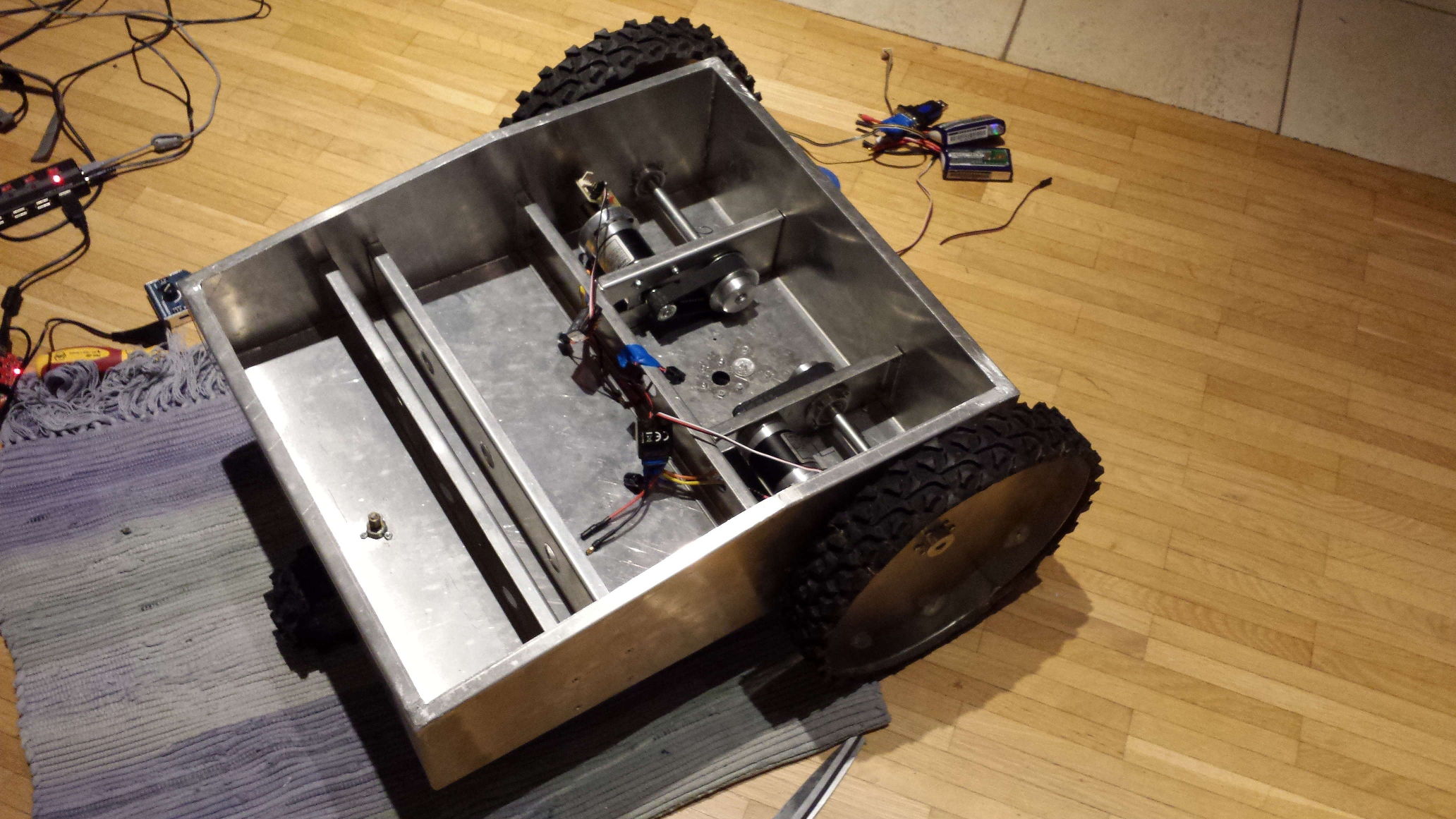

The chassis of the robot is an aluminium box, plasma cut, bent and welded, with U shaped bars screwed inside for additional stiffness and mounting electronics.
Two largish (250 mm diameter) drive wheels are mounted at the front and one smaller freely dragged wheel behind. The wheels are custom made from the same aluminium sheet metal, covered with rubber cut from a bike tire.
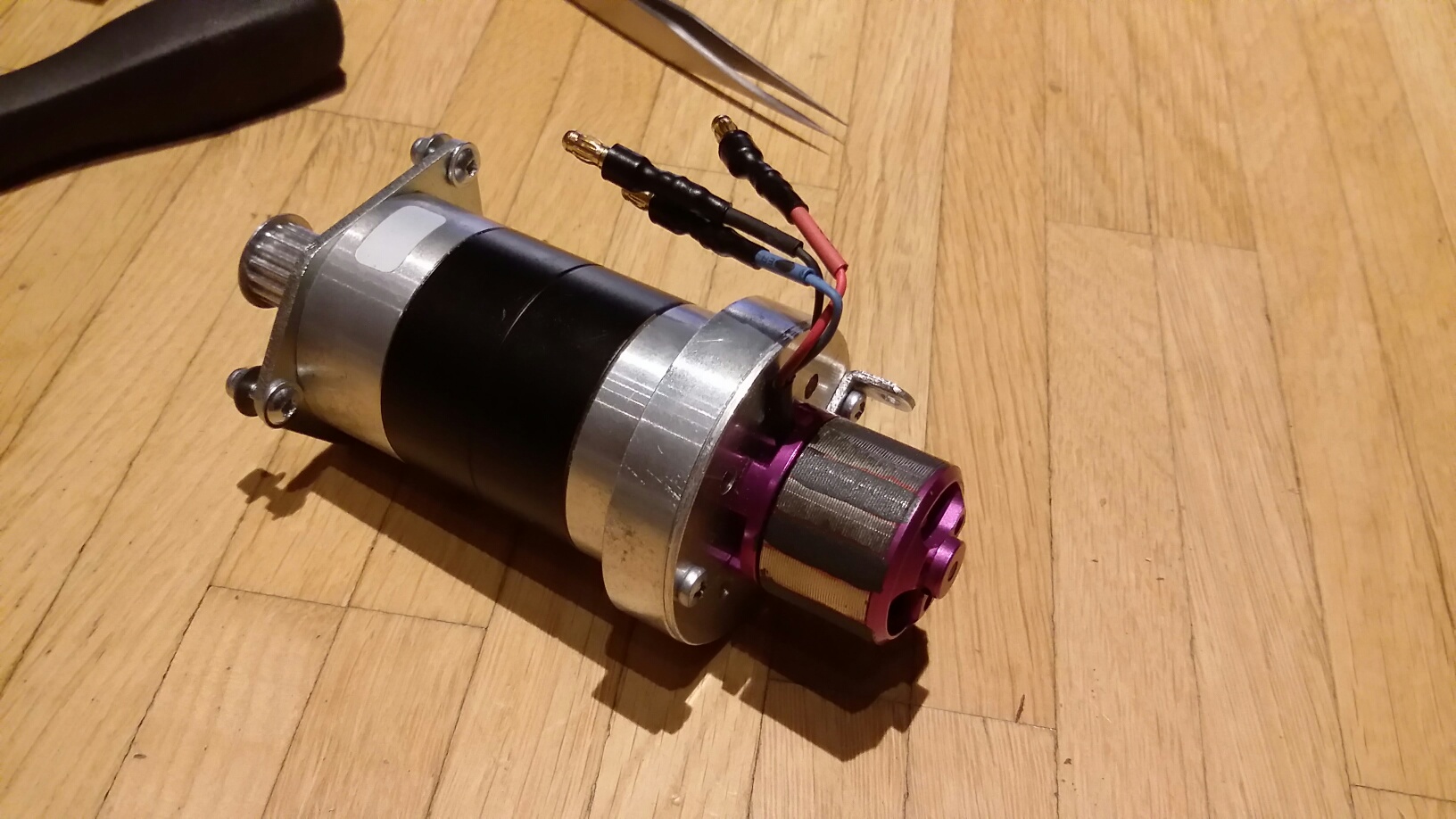
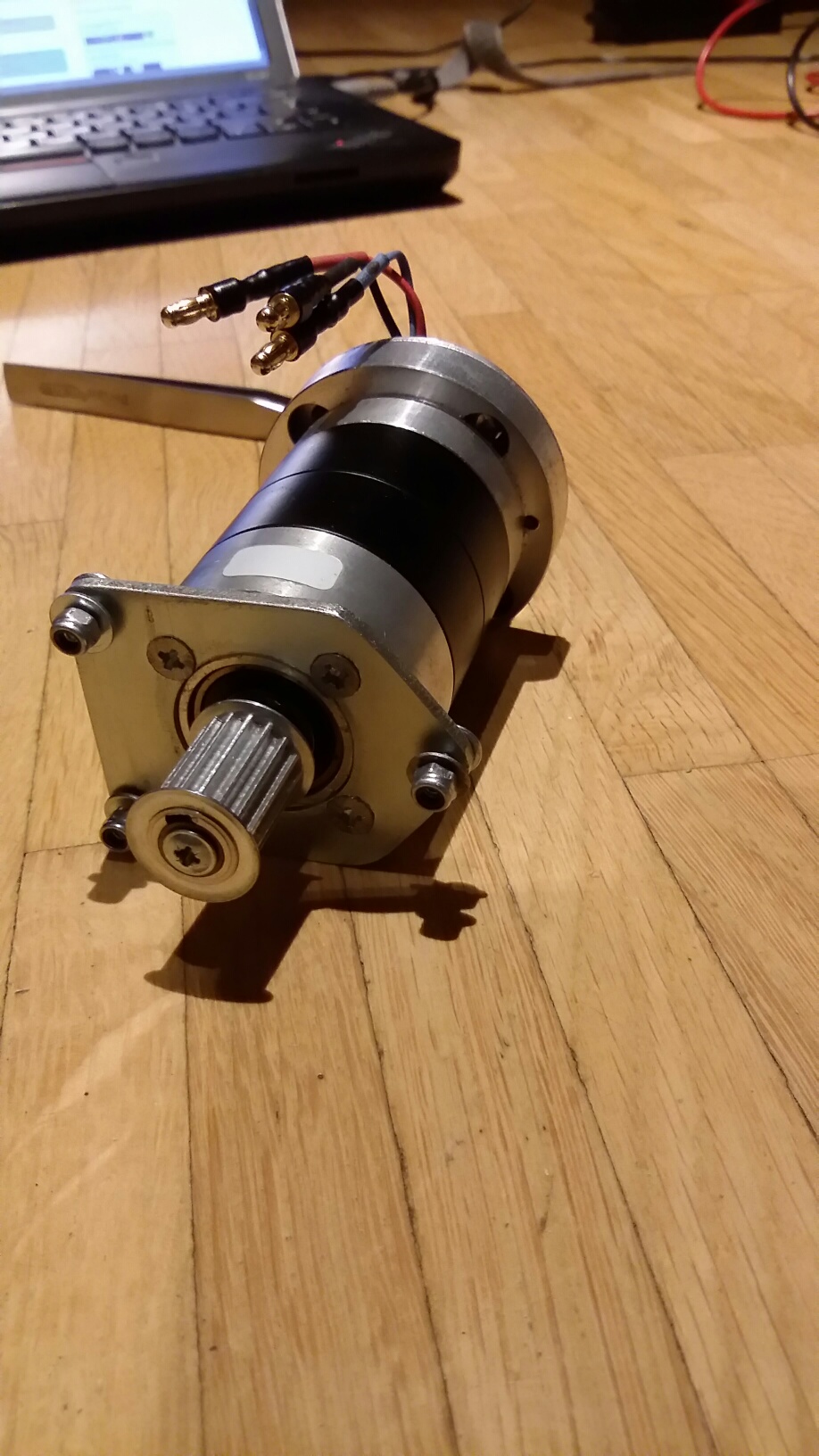
I use BLDC motors (which currently look like more trouble than necessary).
The original design had the motors mounted on Lenze planetary transmission with transmission ratio of about 45:1 and wheels directly on its output shaft. Later we added another stage of 3:1 toothed belt with steel axle on two bearings. This gives us more torque (which is very much needed when starting the motors) and gives a much stronger mount for the wheel.